AksIM™ unterstützt Universal Robots bei der intelligenten Fabrikautomation
Industrieroboter arbeiten normalerweise in Sicherheitszonen und werden für schwere, gefährliche oder sich wiederholende Aufgaben in den Bereichen Luftfahrt, Automobilmontage, Handling, Lackierung, Beschichtung und andere Anwendungen eingesetzt. Herkömmliche Industrieroboter sind meist riesig und sperrig, brauchen viel Platz und setzen eine zeitraubende Programmierung voraus.
Angesichts der unterschiedlichen Herstellungsanforderungen und neuen Technologien wird die Fabrikautomation zunehmend vielfältiger und mit der Einführung intelligenter Fabrikkonzepte hat sich in den letzten Jahren, vor allem in China, eine Reihe neuer Roboterhersteller etabliert. Robotikanwendungen wurden sukzessive von traditionellen Schwerindustrien auf Leichtindustrien, beispielsweise die Produktmontage im Bereich Computer, Kommunikation und Unterhaltungselektronik, sowie andere automatische Produktlinien ausgeweitet, wo Roboter mit hoher Präzision und Flexibilität benötigt werden.
Der Einsatz kollaborierender Roboter wird zu einem schnell wachsenden Trend in der heutigen Industrieautomation. Diese Roboter sind zur Zusammenarbeit zwischen Mensch und Maschine konzipiert, um geplante Aufgaben in der Produktion durch einfache und schnelle Programmierung oder sogar Selbstlernprozesse zu erledigen. Dabei sind Roboter heute nicht mehr eine exklusive Lösung für große Unternehmen, denn auch kleine und mittlere Unternehmen (KMU) können vom Einsatz von Robotern profitieren.
Das dänische Unternehmen Universal Robots (UR) zählt zu den erfolgreichsten und renommiertesten Roboterherstellern auf dem Markt. Seine kollaborierenden Mehrachsen-Roboter sind mit den magnetischen, rotativen Absolutwertgebern der Baureihe AksIM ausgestattet, die eine hervorragende Leistung, Systemsicherheit und Stabilität gewährleisten.
Doch ganz gleich, wie herausragend die Roboterkonstruktion ist, entscheidend sind für maximale Funktionalität und Effizienz die verwendeten Komponenten. Ein Roboter besteht normalerweise aus einem Hauptkörper (Grundgestell), einem servomotorischen Antriebssystem, einem Getriebe und einem Steuerungssystem. Da eine Positionsrückmeldung für die Echtzeit-Positionserfassung der einzelnen Gelenke an die Steuerung erforderlich ist, zählt auch das Messsystem zu den für die Genauigkeit des Roboters ausschlaggebenden Komponenten.
UR-Roboter erzielen eine erheblich verbesserte Gesamtleistung dank der magnetischen Drehgeber-Systeme der Baureihe AksIM, die von Renishaws Partnerunternehmen RLS bereitgestellt werden. Das Messsystem ist an der Rückseite des Getriebes angebracht, um den tatsächlichen Drehwinkel des Robotergelenks direkt zu überwachen. Im Unterschied zu manchen Roboterkonstruktionen, bei denen das Messsystem an der Vorderseite des Getriebes angebracht ist, wird bei diesem Ansatz der Systemfehler beseitigt und dadurch eine Wiederholgenauigkeit des Roboters von ±0,1 mm erreicht. Dies ist zur Erfüllung der meisten Marktanforderungen ausreichend.
AksIM ist ein Absolut-Messsystem, das kein Batterie-Backup erfordert - die absolute Position wird unmittelbar beim Einschalten ermittelt.

Das Messsystem besitzt mehrere integrierte Selbstüberwachungsfunktionen, wodurch die Betriebssicherheit der UR-Roboter verbessert wird. Geber und Ring wurden eigens kompakt konstruiert, damit sie auf dem Getriebe eingebaut werden können. Die Dicke des Gelenks erhöht sich dabei nur um 7 mm. Der Hohlring erlaubt die Kabeldurchführung, wodurch die Kabelanordnung vereinfacht und Kunden mehr Flexibilität bei der Systemkonstruktion geboten wird. Durch die leichte Bauweise des Messsystems wurde auch die Belastung an den Gelenken erheblich reduziert und damit der Energieverbrauch gesenkt.
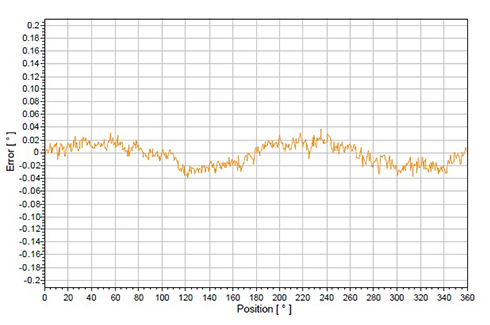
Das Messsystem AksIM besitzt eine herausragende Leistungsspezifikation, die den Anforderungen selbst anspruchsvollster Robotikanwendungen gerecht wird. Seine Auflösung beträgt bis zu 20 Bit bei einer Systemgenauigkeit von bis zu +/-0,1° und einer Wiederholgenauigkeit, die besser als eine Einheit der Auflösung ist. Es verfügt über eine ausgezeichnete Verschmutzungstoleranz durch seinen Schutz nach IP64 und erlaubt dadurch den Einsatz in rauen Industrieumgebungen.
Kollaborierende UR-Roboter gelten auf dem heutigen Markt als einzigartig, denn sie zeichnen sich gleichzeitig durch ihre Einfachheit, Flexibilität und Sicherheit aus. UR arbeitet mit vielen renommierten Unternehmen an der Entwicklung flexiblerer Produktionsprozesse und der Sicherstellung einer gesunden und sicheren Arbeitsumgebung zusammen.
Mit der innovativen Roboter-Systemsoftware PolyScope kann selbst jemand ohne technische Vorkenntnisse oder mit nur begrenzter Erfahrung die Programmierung und das Debugging des Roboters vornehmen. Die Installation dauert weniger als drei Stunden, sodass die UR-Roboter jederzeit auf unterschiedlichen Produktionslinien für neue Arbeitsprozesse eingesetzt werden können. Dadurch ergeben sich unbegrenzte Möglichkeiten für eine flexible Umrüstung von Produktionslinien.
Außerdem können die leichtgewichtigen UR-Roboter an einer beliebigen Stelle auf einem Tisch, Gerät oder sogar an der Decke angebracht werden, was Herstellern Flexibilität bei verschiedenen Anwendungen bietet. Die einzigartigen Kraftmess- und Kraftregelungsfunktionen der UR-Roboter gewährleisten die Sicherheit der Mitarbeiter, sodass die Roboter ihre Arbeit ohne Schutzzäune Seite an Seite mit den Menschen verrichten können. Berührt eine Person den Roboter und übersteigt die dabei auftretende Kraft einen voreingestellten Wert, stoppt der UR-Roboter automatisch.

