Was können Raman-Bilder sichtbar machen?
Raman-Bilder können die Verteilung der chemischen und strukturellen Beschaffenheit innerhalb einer Probe sichtbar machen. Erfahren Sie, wie Raman-Bilder erfasst und ausgewertet werden.
Was Raman-Bilder Ihnen sagen können
Mithilfe der spektralen Daten in jedem Pixel eines Raman-Bildes können wir Folgendes bestimmen:
- ob ein Stoff oder eine Spezie vorhanden sind
- ob unbekannte Stoffe vorhanden sind
- die Verteilung eines Stoffes oder einer Spezie
- die Größe von Partikeln oder Domänen
- die relativen Mengen von Stoffen oder Spezien
- strukturelle Veränderungen in einem Stoff, wie Kristallinität oder Spannungszustand
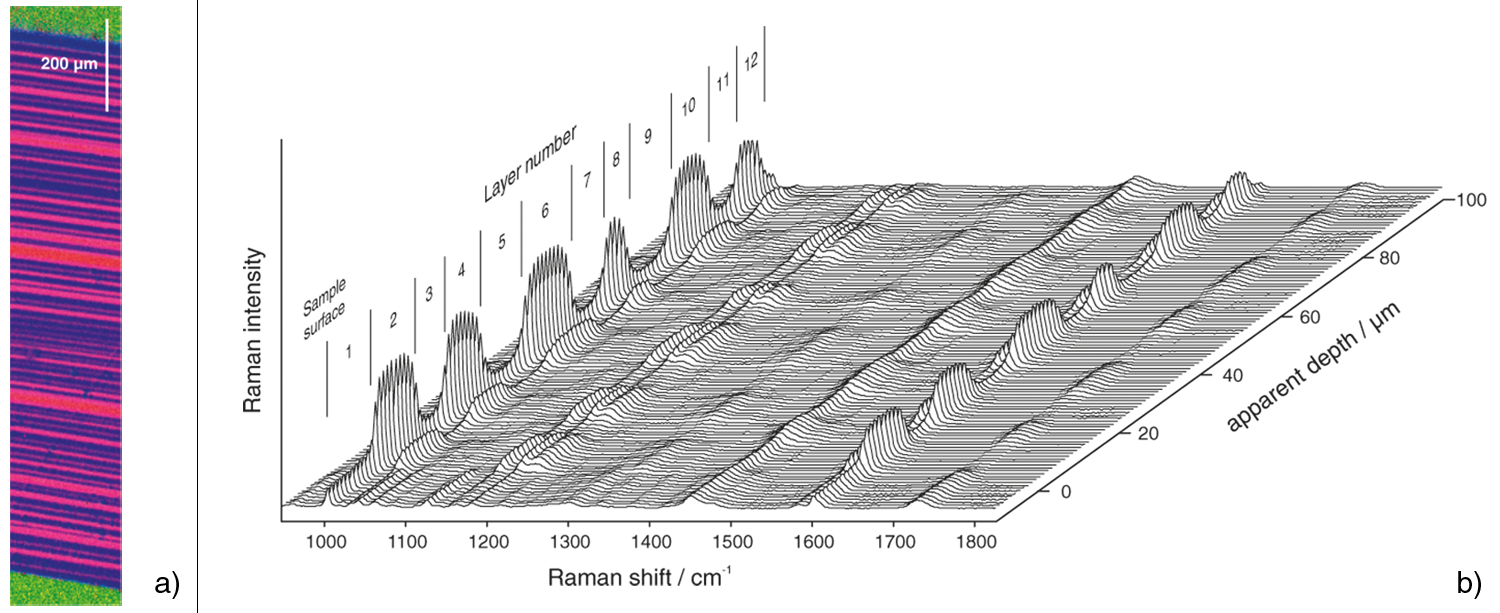
- die Stärke und Zusammensetzung von geschichteten Werkstoffen, wie Polymerlaminaten, in Stärken vom Mikrometer- bis Millimeterbereich
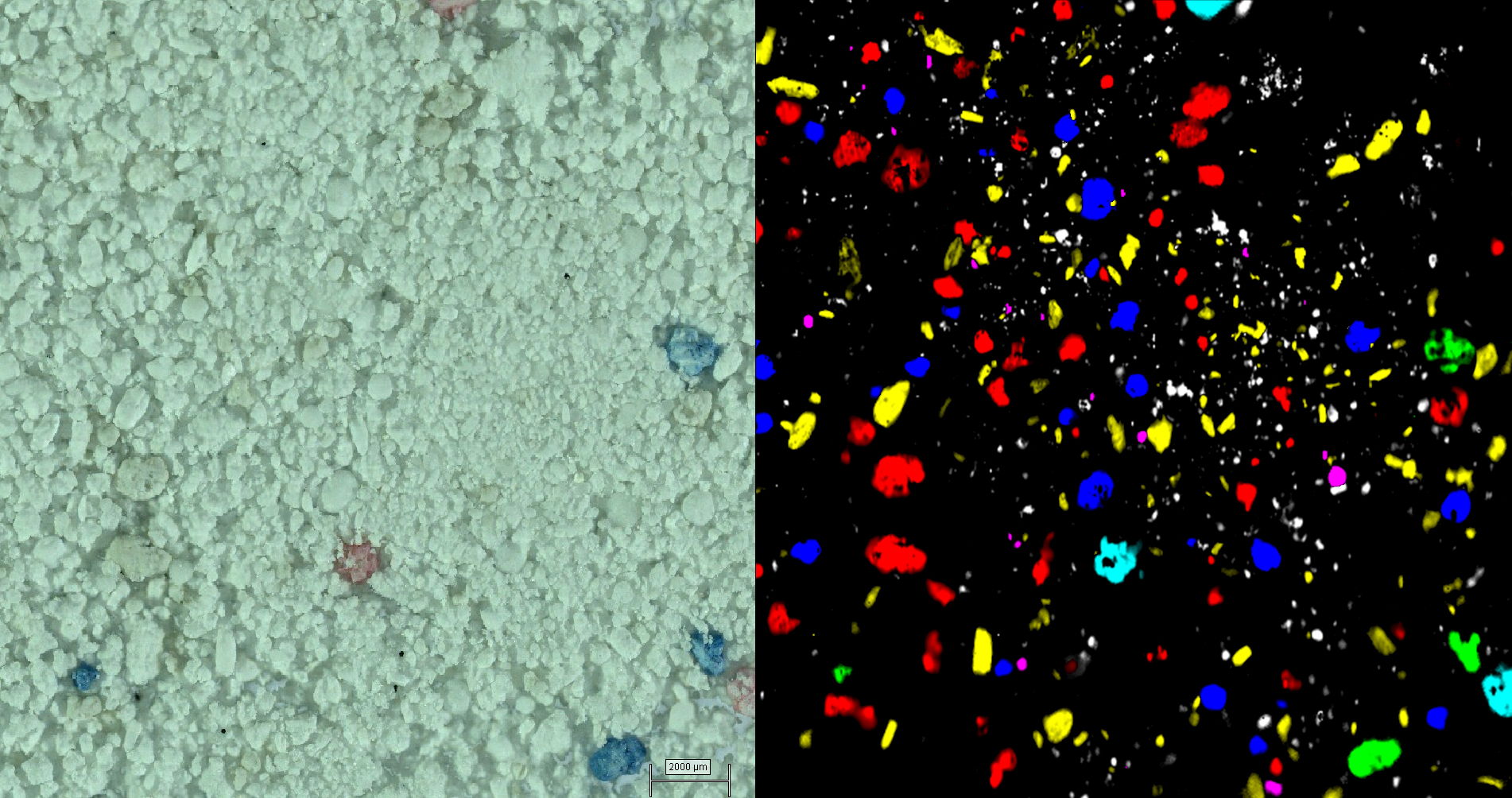
Weißlicht- und Raman-Bilder von Waschpulver. Die Raman-Bilder zeigen chemisch unterschiedliche Domänen, die auf dem Weißlichtbild nicht sichtbar sind.
Qualitative und quantitative Raman-Bildgebung
Falschfarben-Raman-Bilder sind ein leistungsfähiges Instrument, um die Verteilung chemischer und struktureller Eigenschaften innerhalb einer Probe zu verdeutlichen. Helligkeit, Kontrast und Farbe des Bildes können dazu beitragen, die Zusammensetzung des Materials darzustellen. Durch Überlagerung einzelner Raman-Bilder können Sie die Verteilung mehrerer Spezies oder Eigenschaften gleichzeitig anzeigen.
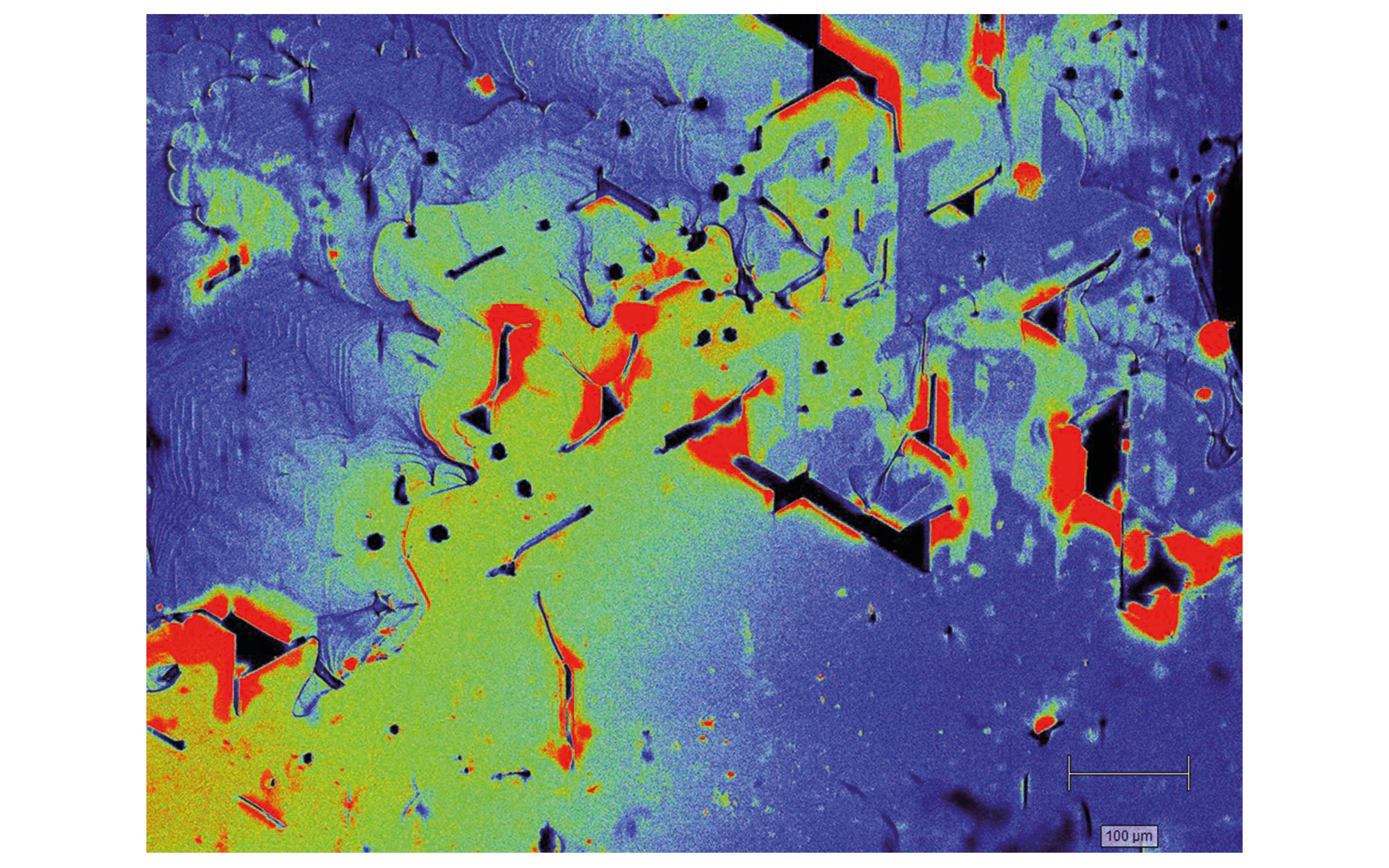
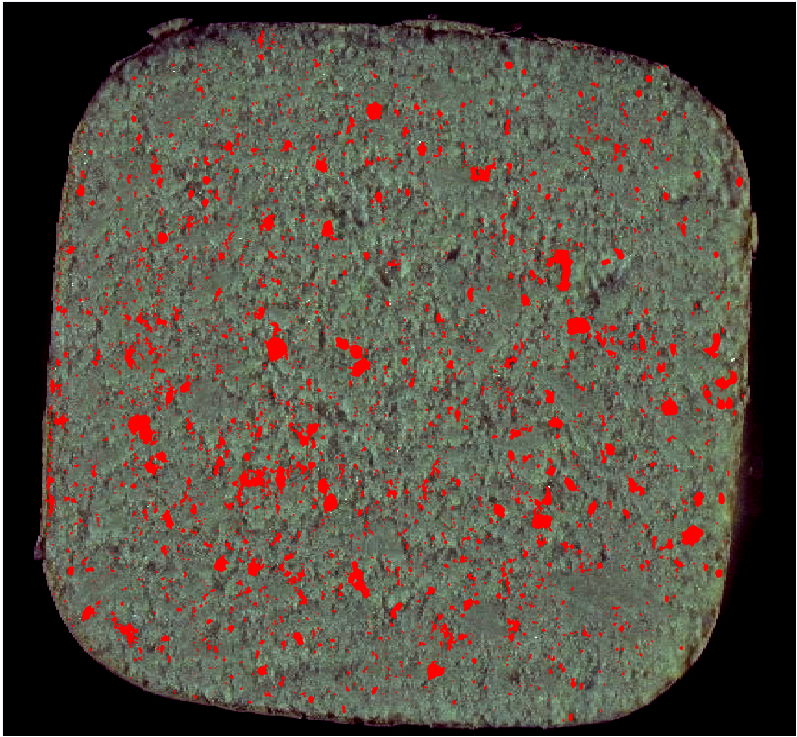
Raman-Bild eines SiC-Wafers. Der Bildbereich misst etwa 1 mm2und zeigt Einschlüsse von 6H-Siliziumcarbid, 3C-Siliziumcarbid oder Si (rot) sowie Hohlräume (schwarz). Die Spannungsverteilung wird in einem Spektrum von blau bis grün dargestellt.
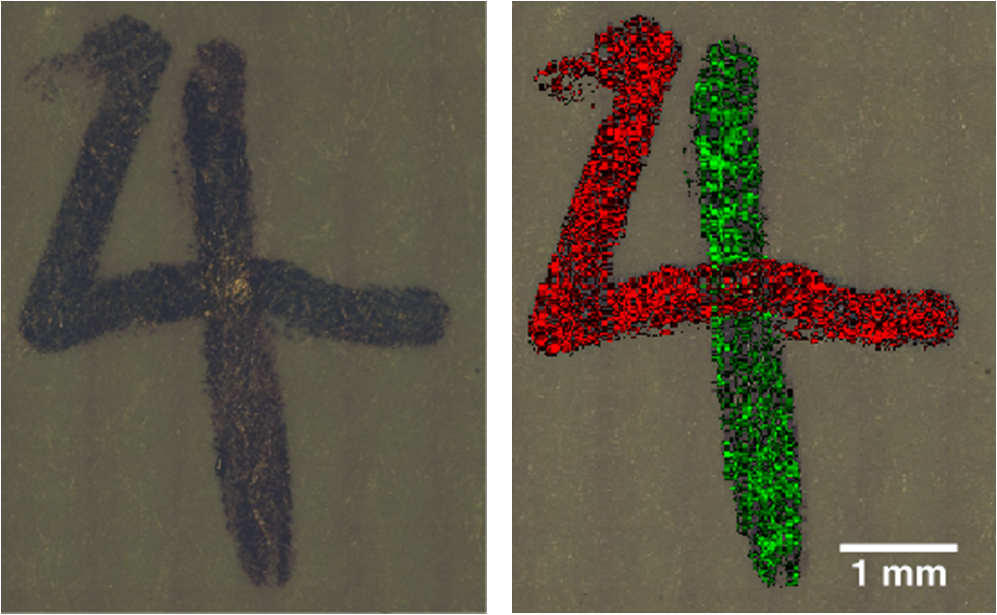
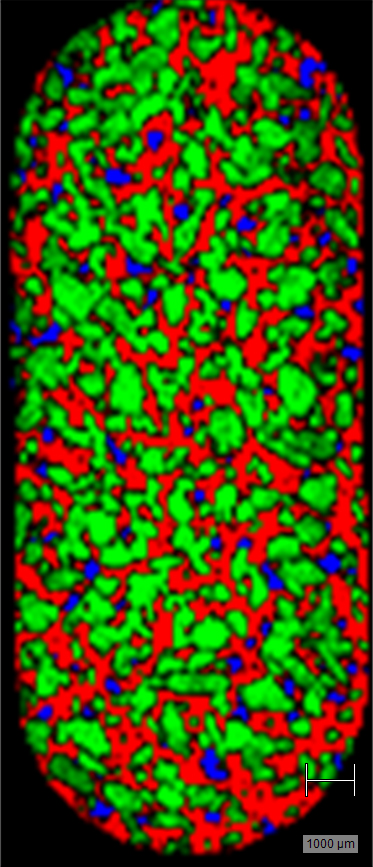
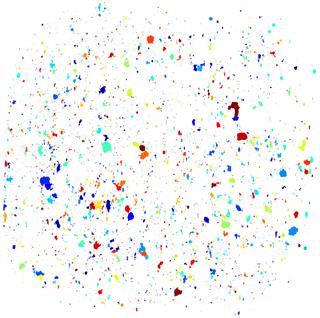 Raman-Bild des Montelukast-Natrium-Wirkstoffs in einer Tablette zur oralen Einnahme. Zur Veranschaulichung werden die Domänen des aktiven Wirkstoffs in verschiedenen Farben dargestellt.
Raman-Bild des Montelukast-Natrium-Wirkstoffs in einer Tablette zur oralen Einnahme. Zur Veranschaulichung werden die Domänen des aktiven Wirkstoffs in verschiedenen Farben dargestellt.
Wie erfassen wir Raman-Bilder?
Mit einem Raman-Mikroskop nehmen wir Raman-Spektren von jeder Stelle der Probe auf. Anschließend speichern wir alle Raman-Spektren in einer einzigen Datei, die wir als „spektralen Hyperwürfel“ bezeichnen. Schließlich analysieren wir den spektralen Hyperwürfel, um Raman-Bilder zu erzeugen.
Es gibt verschiedene Methoden der Raman-Bildgebung wie:
Fokuspunkt
Das Raman-Mikroskop fokussiert den Laser auf einen Punkt auf der Probe. Wir positionieren die Probe auf einem motorisierten Objekttisch, der die Probe unter den Laser bewegt. Das Spektrometer erfasst die Spektren verschiedener Punkte auf der Probe.
Die Bildgebungstechnologien StreamHR™ und StreamHR™ Rapid sind schnelle Varianten der Fokuspunkt-Bildgebung. Die Raman-Bildgebung mit StreamHR Rapide-Technologie kann über 1 000 Punktspektren pro Sekunde erfassen.
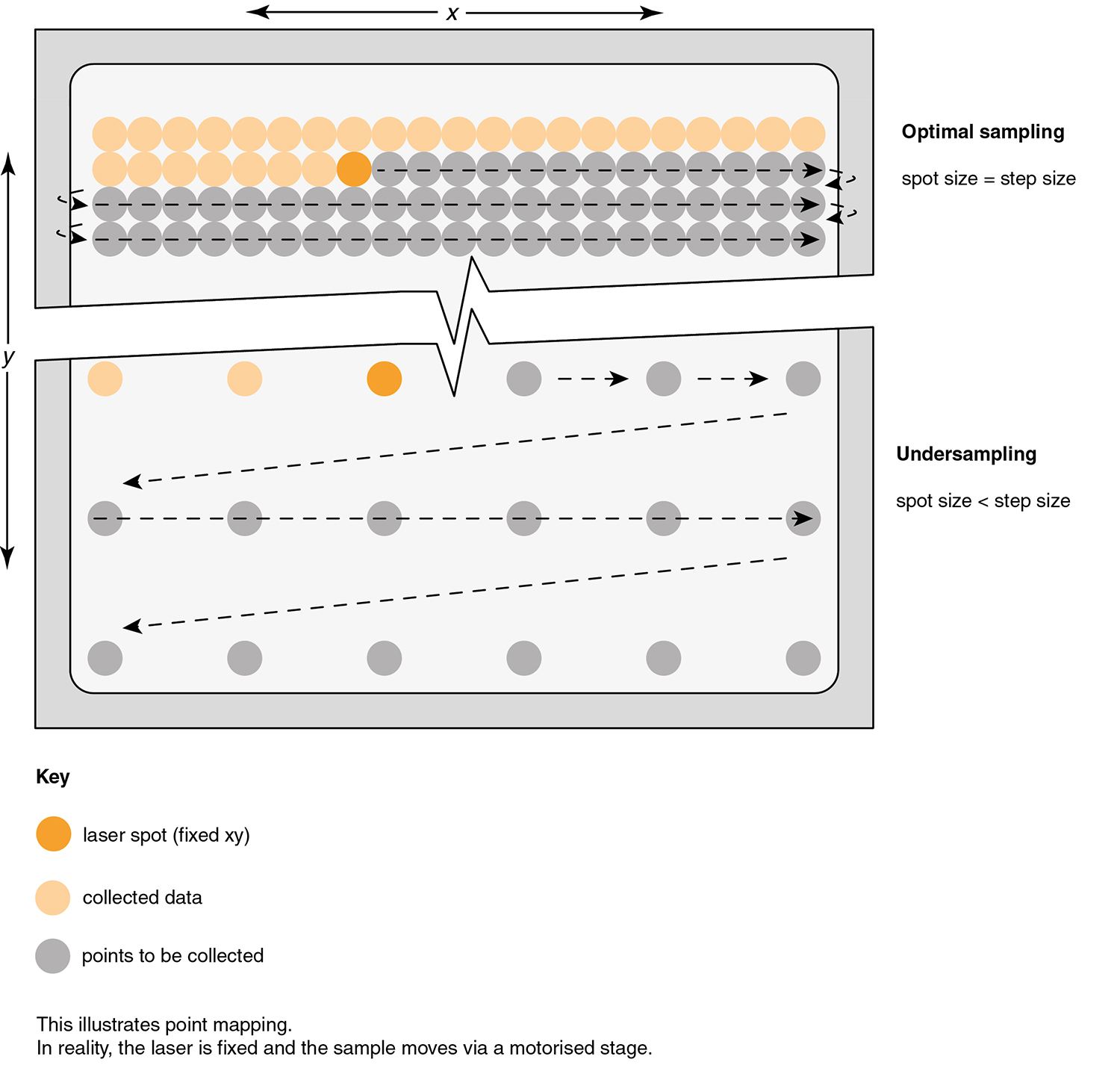
Darstellung einer Bildgebung mittels Einzelpunktabtastung, die sowohl die optimale Abtastung als auch die Unterabtastung zeigt
Fokuslinie
Statt eines Punktes bestrahlt der Laser eine Linie auf der Probe. Auf diese Weise können Sie gleichzeitig Spektren von mehreren Positionen auf der Probe erfassen und Zeit sparen. Mit dieser Methode kann eine insgesamt höhere Laserleistung eingesetzt werden, ohne die Probe zu beschädigen. Die StreamLine™-Bildgebungstechnologie von Renishaw ist eine hochentwickelte moderne Umsetzung dieses Konzepts. Bei der Fokuslinien-Bildgebung bestrahlt der Laser statt eines Punktes eine senkrechte Linie auf der Probe.
Bei der Bildgebung ist es wichtig, die potenziell unerwünschten Auswirkungen der Unterabtastung zu berücksichtigen. Eine Unterabtastung tritt auf, wenn der Laserpunkt oder die Linie kleiner sind als der Abstand zwischen den Messpunkten. Renishaw hat dieses Problem unter Verwendung der StreamLine-Technologie mit Slalom-Modus gelöst.

Die Streamline™-Bildgebungstechnologie mit Slalom-Modus gewährleistet eine komplette Probenabdeckung, selbst bei großen Schrittweiten (Pixel). Sie können schnell Raman-Bilder größerer Proben erstellen, ohne dass Ihnen etwas entgeht.
StreamLine-Technologie für eine schnelle, zerstörungsfreie Raman-Bildgebung
Das System scannt die Laserlinie entlang der Y-Achse über der Probe. Der CCD-Detektor sammelt gleichzeitig Daten von mehreren Punkten auf der Probe.
Die Schrittweite in X entspricht der Breite der Laserlinie. Diese Methode gewährleistet eine vollständige Erfassung, allerdings nicht in der schnellsten Geschwindigkeit.
Unterabtastung ohne Slalom-Modus
Die Schrittweite in X ist größer als die Breite der Laserlinie. Die Zwischenräume zwischen den Pixeln werden nicht von der Laserlinie abgetastet, sodass einige Bereiche der Probe nicht vom Spektrometer analysiert werden. Diese Abbildung zeigt ein System, das nur ca. 20 % der Probe erfasst hat.
Streamline-Technologie mit Slalom-Modus für eine schnelle, vollständige Abdeckung
Die Zick-Zack-Bewegung der Laserlinie digitalisiert die zwischen den Pixeln liegenden Bereiche. Dies ermöglicht eine Schrittweite in X, die größer ist als die Breite der Laserlinie.
Das Spektrometer sammelt nun 100 % der Probendaten in höchster Geschwindigkeit.

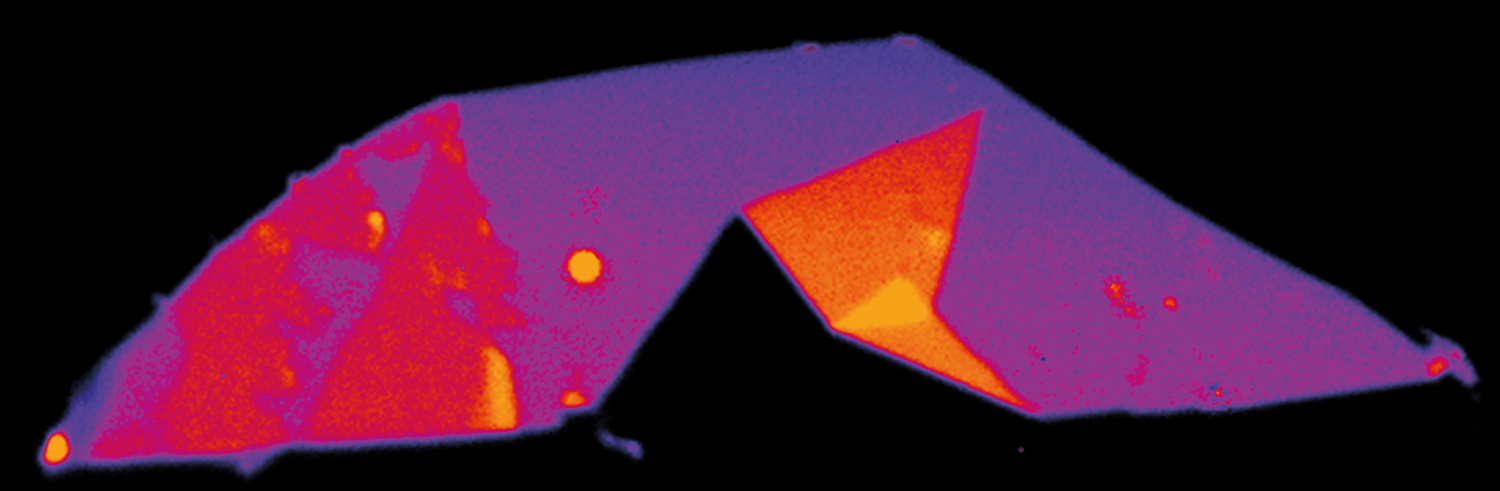
Ein Raman-Bild zeigt die Gewebestruktur in der Darmdrüse einer gesunden Ratte. Dieses Bild wurde mittels HKA erstellt.
Wie kann ich Raman-Bilder auswerten?
Wir können Raman-Spektren aus einem Bildgebungsexperiment, durch das wir 1D-Profile, 2D-Bilder und gerenderte 3D-Volumina erhalten, analysieren. Das Raman-Bild könnte einfache univariate Bandenparameter wie die Intensität einer Raman-Bande zeigen. Sie könnten auch eine vollständige multivariate Analyse des gesamten Raman-Spektrums über den spektralen Hyperwürfel durchführen.
Renishaws WiRE™ Software bietet zahlreiche Optionen für die Auswertung von Raman-Bilddaten:
Intensität bei einer Frequenz des Spektrums
Diese Bilder lassen sich schnell erstellen, können aber irreführend sein. Diese Methode lässt keine Unterscheidungen zwischen Intensitäten zu, die von einer zu prüfenden Raman-Bande stammen, und solchen, die auf eine allgemeine Hintergrundfluoreszenz zurückzuführen sind.
Kurvenausgleichswerte
Bei jedem Spektrum eines Raman-Bildes können Sie eine theoretische Kurve für jede Raman-Bande einpassen. Sie können für Raman-Banden Werte wie Raman-Verschiebung, Bandenbreite oder relative Intensität berechnen. Raman-Bilder zeigen oft Schwankungen in der Raman-Verschiebung einer Bande, die auf lokale Spannungen hinweisen können. Sie können auch Schwankungen in der Breite der Raman-Bande darstellen – ein Hinweis auf unterschiedliche Kristallinitätsgrade.
Multivariate Parameter
Die multivariate Analyse ist sehr leistungsfähig, da sie Informationen aus dem gesamten Spektrum verwendet und nicht nur einen Raman-Bandenwert (wie die Intensität bei einer Frequenz oder eine Bande mit Ausgleichskurve). Dies führt in der Regel zu qualitativ hochwertigeren Raman-Bildern mit einer besseren chemischen Spezifität.
Wenn Sie über Referenzspektren für die chemischen Bestandteile in Ihrer Probe verfügen, können Sie problemlos Raman-Bilder erstellen, die deren Verteilung zeigen. In solchen Fällen würden Sie Komponentenanalyseverfahren wie direkte klassische kleinste Quadrate (Direct Classical Least Squares, DCLS) oder nicht-negative kleinste Quadrate (Non-Negative Least Squares, NNLS) verwenden. Sie können diese Komponentenanalyseverfahren verwenden, um Schätzungen zur quantitativen Konzentration zu erhalten.
Sollten keine Referenzspektren zur Verfügung stehen, können Sie Raman-Bilder mit unbeaufsichtigten chemometrischen Methoden erstellen, wie unter anderem Clusteranalyse, Hauptkomponentenanalyse (HKA) oder die Softwarefunktion EmptyModelling™ von Renishaw. Wir können diese chemometrischen Methoden anwenden, ohne zu wissen, was in der Probe enthalten ist. Diese Methoden analysieren die systematische Varianz zwischen Raman-Spektren, um spektrale Komponenten vorherzusagen. Ein Raman-Bild zeigt dann die Verteilung der spektralen Komponenten in der gesamten Probe.
Um Raman-Bilder von biologischen Geweben und Zellen auszuwerten, nutzen wir häufig die Cluster- und Hauptkomponentenanalyse. Mit diesen leistungsfähigen chemometrischen Methoden können Strukturen in biologischen Proben aufgespürt werden, die oft keine reinen Biochemikalien enthalten.
Die Funktion „EmptyModelling“ ist eine benutzerfreundliche Version der MCR-ALS-Methode (MCR-ALS steht für „multivariate curve resolution alternating least square“). Mit dieser Methode lassen sich Raman-Bilder von Proben erstellen, die unbekannte Bereiche der reinen Komponenten sichtbar machen. Dies ist für Proben wie Halbleiterwafer oder pharmazeutische Formulierungen von Bedeutung.
Wissenswertes über Raman-Spektroskopie
Neu auf dem Gebiet der Raman-Spektroskopie? Machen Sie sich schnell mit den Grundlagen der Raman-Analyse vertraut.
Bildergalerie









Was ist Raman-Spektroskopie?
Erfahren Sie noch mehr über die Raman- und Photolumineszenz- (PL-)Spektroskopie. Wir beantworten Ihre Fragen zur Raman-Mikroskopie, schnellen Raman-Bildgebung, Datenauswertung, Fluoreszenz und zu begleitenden Analyseverfahren.
Wissenswertes über Raman-Spektroskopie